- TOP
- 他社で断られた方へ
ピエゾのことならお任せください!
ピエゾシステムの選び方
こちらのページでは、ピエゾシステムのプロフェッショナル、翔栄システムがピエゾシステムの選び方をご案内します。適切なシステム構築により、より精密でコスト重視な製品をご提供。他社で断られてしまったご相談でも、翔栄システムではどうしたらご要望にお応えできるかを考えます。
精密でコストを実現するピエゾシステムの選び方
1. 負荷の種類(質量負荷 タイプ or 弾性負荷タイプ)を見極める
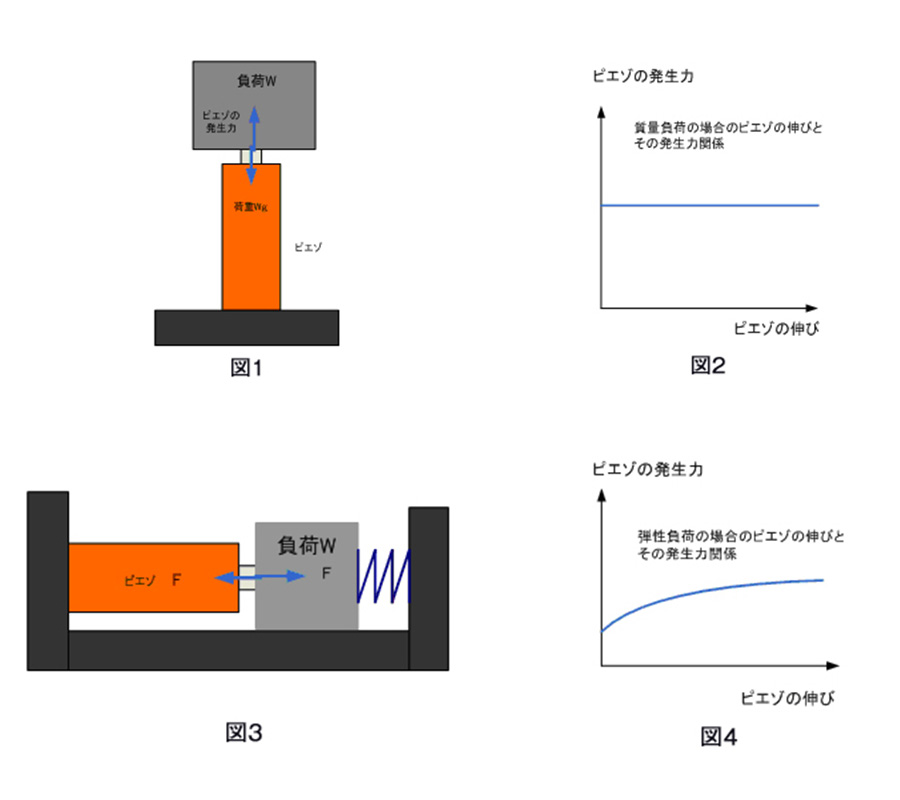
負荷の種類は「質量負荷タイプ」と「弾性負荷タイプ」の2つがあります。「質量負荷タイプ」は、ピエゾの伸びによらず、ピエゾ発生力が一定となります。一方、「弾性負荷タイプ」の場合、ピエゾの伸びによってピエゾの発生力が変化します。最終的にピエゾの伸びがどれくらい必要かを考え、取り付け部の弾性とピエゾの剛性からピエゾのモデルを選択することが大切です。
2. ピエゾアクチュエータのフルスロークと剛性

ピエゾアクチュエータによって、どれくらいの変位を得たいのかを決めましょう。ピエゾは加わる荷重によってピエゾ自体が縮むため、見かけ上ストロークが減ったようにみえます。実際のストロークを求めるには、ピエゾアクチュエータの剛性と負荷の弾性から負荷最大時の応力からその時のピエゾの縮みの最大値を決める必要があります。ピエゾのフルストロークの80%程度が、必要とするストロークになるのが理想的です。
希望のストローク=製品のフルストローク)∗80%
=製品のフルストローク-弾性負荷によりピエゾの縮み
3. 必要とされる発生力
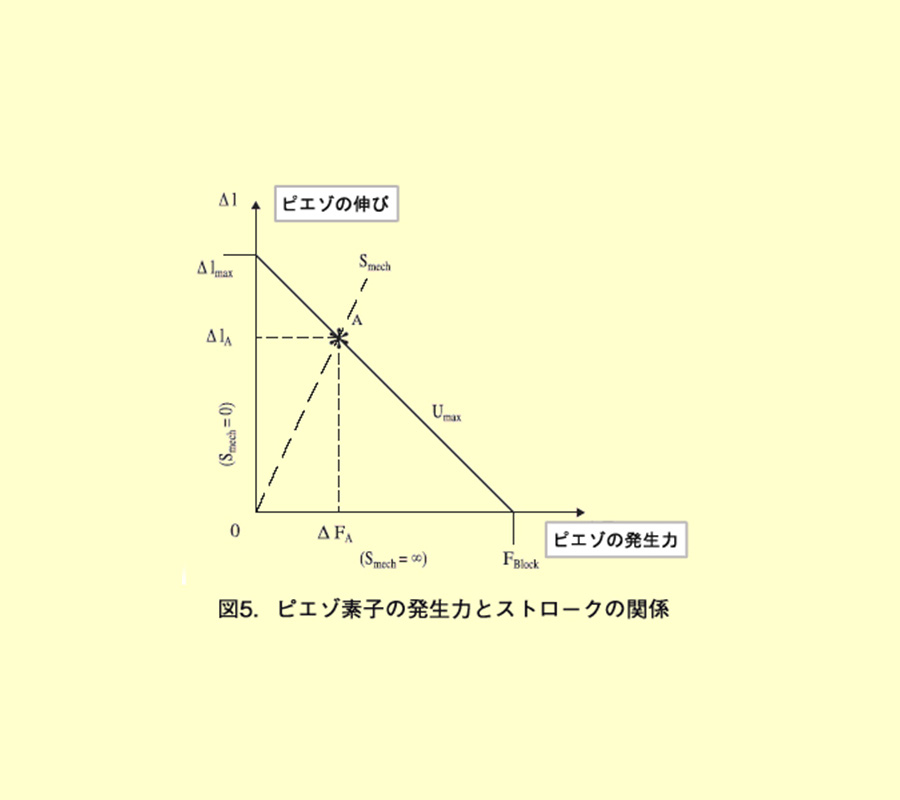
ピエゾの伸びは位置決めに使われるだけではなく、力の発生源としても使われます。ピエゾの発生力が最大になるのは、ピエゾの伸びを完全にゼロにして駆動電圧を最大にしたときです。この最大発生力は「Blocking Force」と呼ばれます。一般的にピエゾ素子の断面積が大きいほど最大発生力が大きくなります。
4. 駆動速度
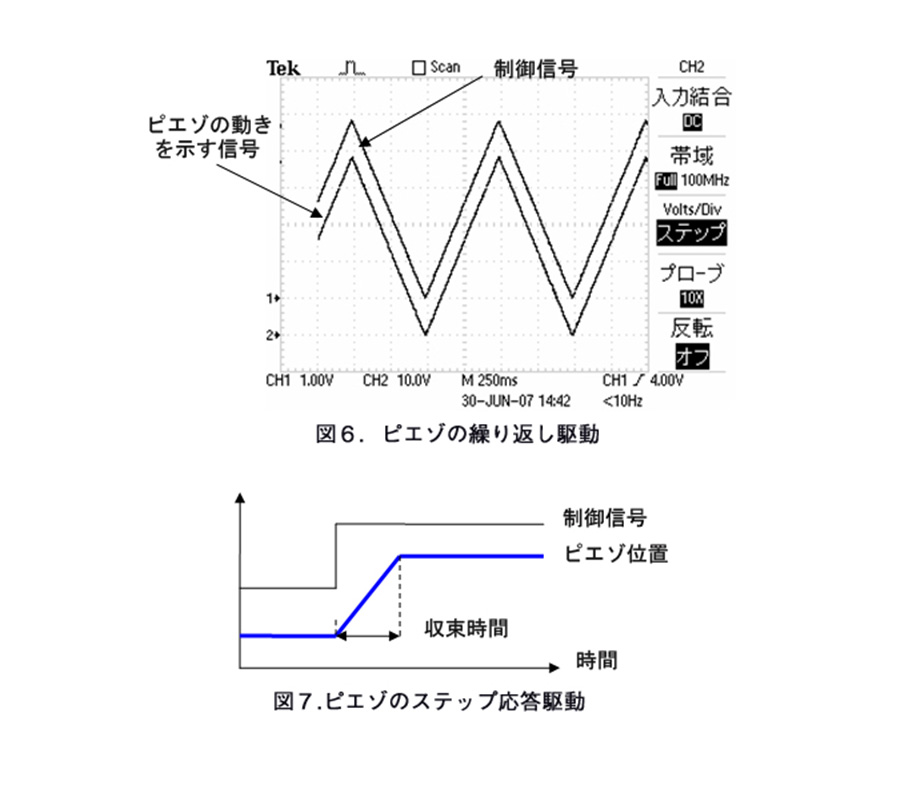
駆動速度は大きく分けて2つの表現方法があります。1つは、正弦波状に 30μm p-pの振幅で、30Hzで動かす、というような表現方法。もう1つは、ある点から別の点まで一気に移動するのに必要な時間で表す表現方法です。
駆動スピードは、ピエゾ素子の静電容量、駆動電源の電流容量、ピエゾアクチュエータによって動かされる負荷の質量、外部プリロードの大きさによって決まります。他の条件が一定であれば、ピエゾアクチュエータの静電容量が小さいほど、駆動速度は速くできます。
5. 位置決め精度とその定義
ピエゾアクチュエータ、ピエゾステージの位置決め精度は4つの構成要素によって決まります。
1分解能
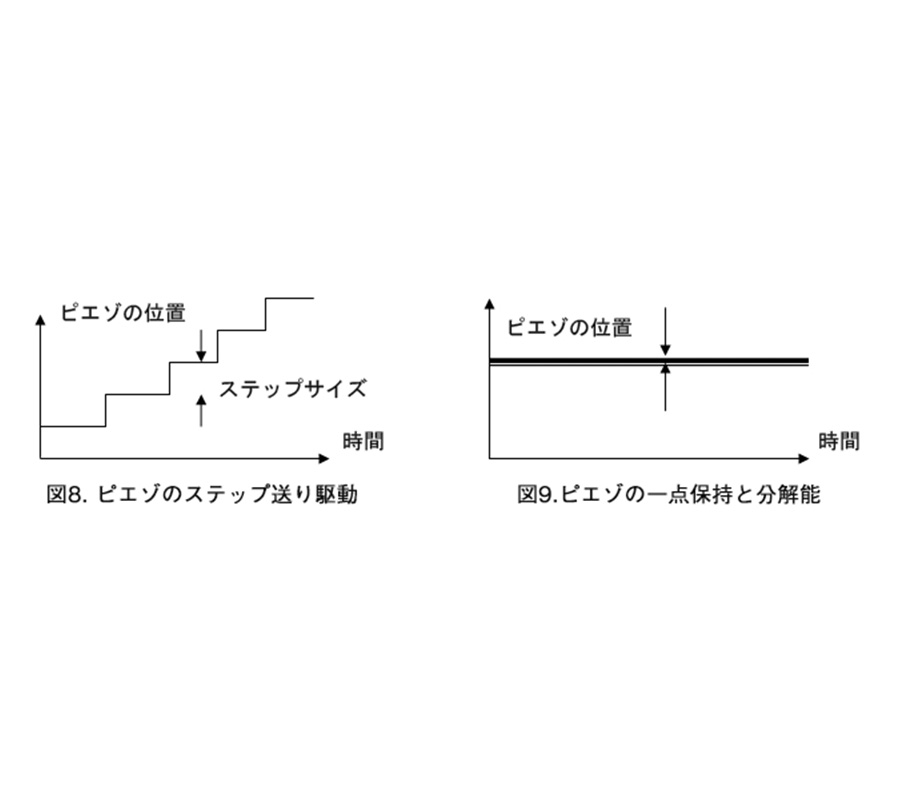
ピエゾをどの程度細やかに移動させることができるか(ステップサイズ)、もしくは一点に止まらせたい場合、どれくらい狭い範囲にとどまらせることができるかの程度(position noise)を表します。分解能が小さいほど細やかな送りが可能です。
2線形性(リニアリティ)
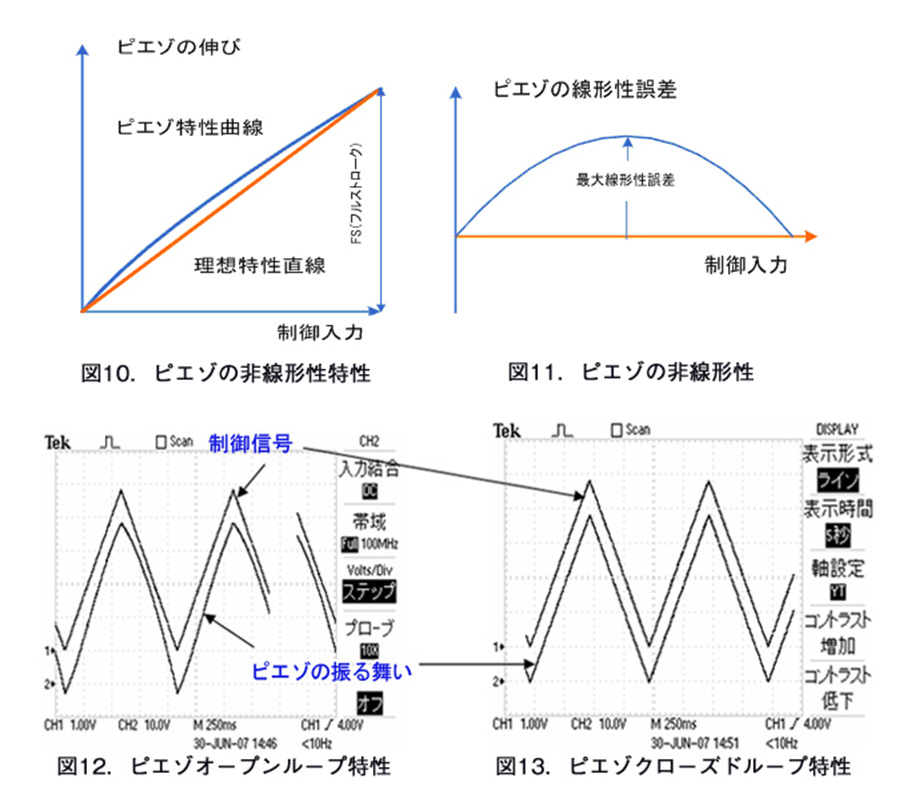
図10のグラフに示すようにピエゾ素子の特性は完全に線形ではなく、少しふくらみのある線になります。この非線形性の程度は、非線形性(=最大線形性誤差/ FS(フルストローク)[%] )で表すことができます。非線形性を補正する方法として、ピエゾの伸びをセンサ(歪ゲージ、静電センサ、渦電流センサ)を使って検出し、フィードバックをかけ、線形性デバイスとして使用する方法が一般的です。
3再現性(ヒステリシス)
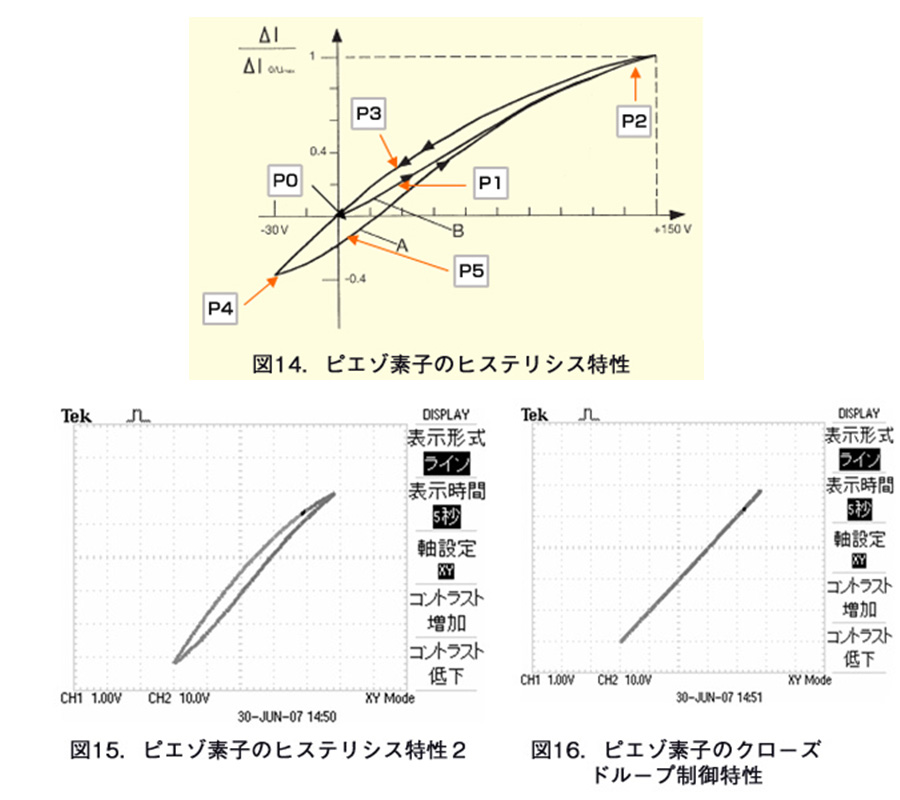
ピエゾ素子に加える電圧を0Vから徐々に上げてくと、ピエゾの伸びは図14に示すようにP0·→P1··→P2と変化し、逆にその点から電圧を徐々に減らしていくとP1を通らずにP2→P3→P4と変化します。
その位置から電圧を増やしていくとP1の位置を通らずにP4→P5→P2と変化します。これを連続的に行うと、図15のようにふくらみをもった特性になります。これをピエゾ素子のオープンループ特性と呼びます。これにセンサを使ったクローズドループ制御をすることで、直線的なクローズドループ特性を行うことができます。
4スケールファクターエラー
(scale factor error)
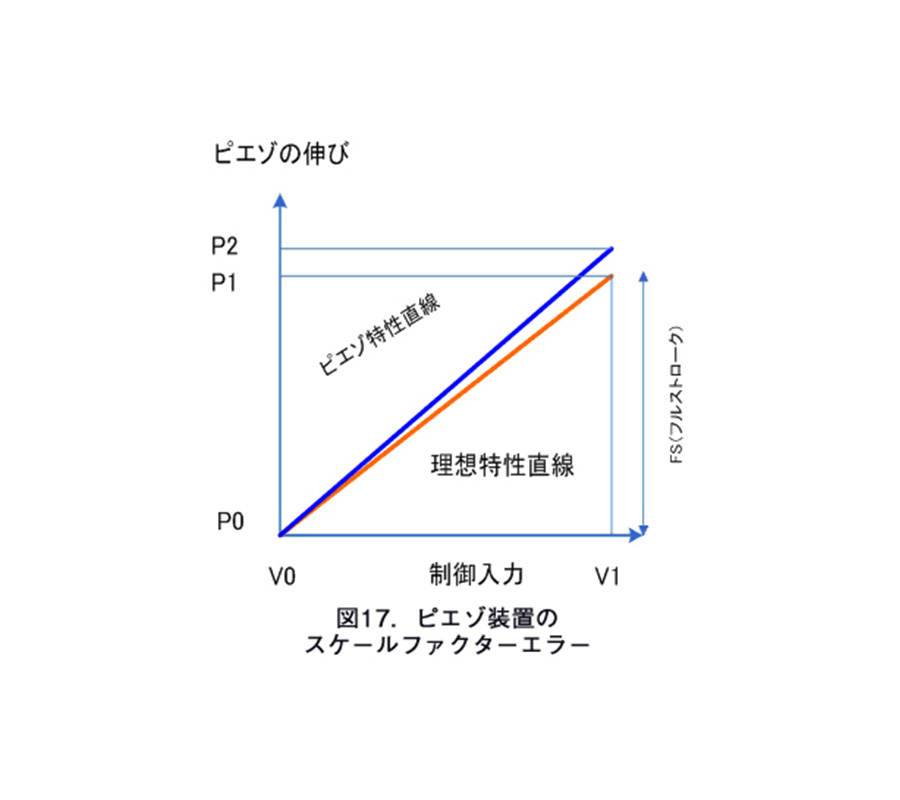
図17のグラフで、ピエゾの駆動装置へ加える制御電圧をV0からV1へ変化させたとき、ピエゾの伸びがP0からP1に変化するように期待される装置では、スケールファクタをスケールファクタF0=(P1-P0)/(V1-V0)と定義します。しかし、実際のピエゾシステムでは正確にこの通りにならず、
F1=(P2-P0)/(V1-V0)となります。
このとき、F1-F0をスケールファクターエラーと呼びます。一般に(F1-F0)/F0[%]で表します。スケールファクターエラーが0[ゼロ]である程、正確な制御ができます。これは主にクローズドループ制御の場合に使用されます。このスケールファクターエラーが、最も位置決め精度に影響を与えるパラメータになります。
6. 制御方法
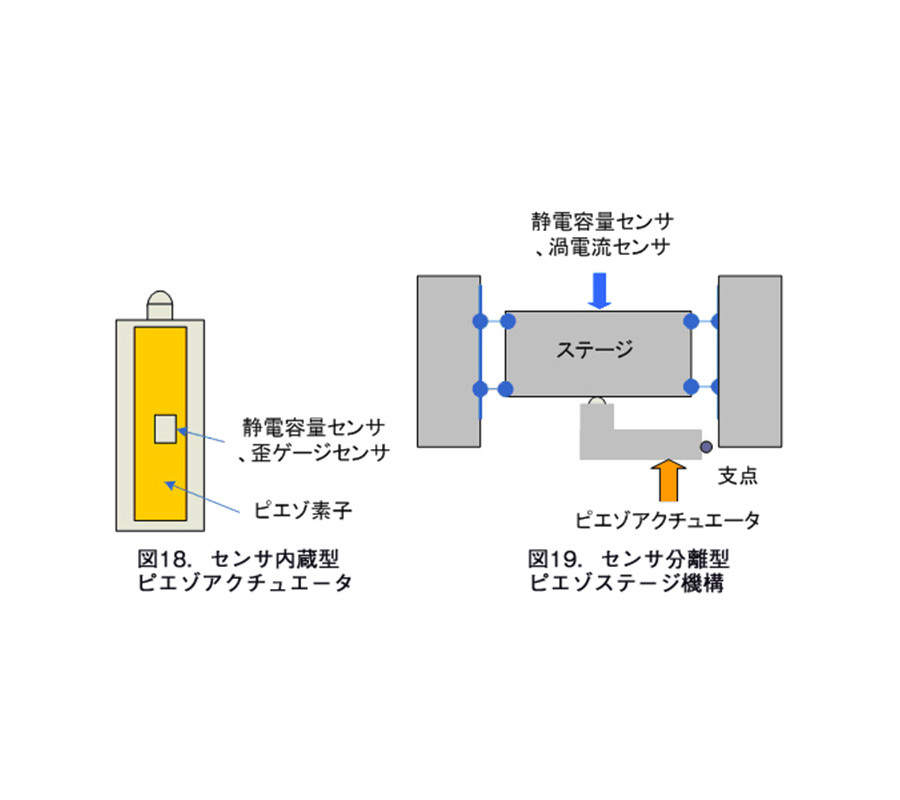
ピエゾ素子およびピエゾ素子を使用したステージの制御方式はオープン制御方式とクローズドループ制御に大きく分類されます。ピエゾ素子は本来、線形性と再現性が悪く、一定の電圧を加えても一点にとどまっていることを苦手な素子です。この弱点を補うため、ピエゾの位置を検出するセンサを使用したクローズドループ制御を一般的に採用します。また、センサの種類、センサの設置場所によっても位置決め精度が変わります。
近年の傾向としては、ピエゾステージ機構は大型化し、センサ分離型が多用される傾向にあります。
7. ターゲット・コスト

一般に市販されているピエゾアクチュエータ、ピエゾステージはお客様のニーズに合った最適な製品とは限りません。翔栄システムでは、コスト面も含めてお客様の要望に合った製品を提供させていただきます。目的に合った、コストパフォーマンスの高い製品を一緒に検討していきましょう。
PICK UP「とりあえず相談してみたい」
などでも問題ありません!
ピエゾシステムの選定は、文書のみで理解いただくのは難しい点が多いです。理解しづらい点や疑問点はピエゾ位置決め装置のプロフェッショナルである翔栄システムが分かりやすくご案内させていただきます。「自社にぴったりの製品が分からない」「質問内容もいまいちまとまっていない」という方も、遠慮なくご相談ください。